



そうしたタコの触手を模したロボットを、ハーバード大学の研究者らが開発した。本物さながら触手がなめらかに動き、ものをつかんで動かすことができる。
・吸盤の配置まで模倣

開発したのはハーバード大学の工学・応用科学スクールと中国・北京航空航天大学の共同研究チーム。このほどロボットが作動する様子を収めたビデオを公開した。
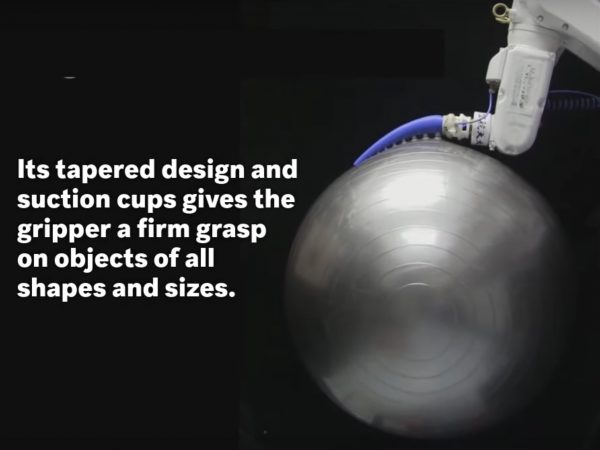
ロボットはタコの触手を模していて、根元から先のほうにいくにしたがって細くなり、また先端までしっかりと吸盤が付いているなどかなり本物に近いデザイン。吸盤の配置も本物を参考にしているという。
・バルブ2つをフル活用
これを可能にしているのが2つのバルブだ。1つはアームを曲げるためのプレッシャーに、もう1つは吸盤を機能させるために真空にするのに使う。つまり、曲げる力と吸う力を微妙にコントロールできるのがこのロボットの肝だ。
ロボットアームというと人の手を模したものが多いが、このタコロボットの場合、細くて柔軟なため、細い穴から触手をのばし、その先にあるものをつかんで引き出す、ということもできる。
研究チームは、このタコロボットを次世代のソフトロボティックアクチュエーターの開発に活用できれば、と話している。
(文・Mizoguchi)
- Original:https://techable.jp/archives/118508
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:mizoguchi