

Image: OmniTact: A Multi-Directional High Resolution Touch Sensor/ arXiv
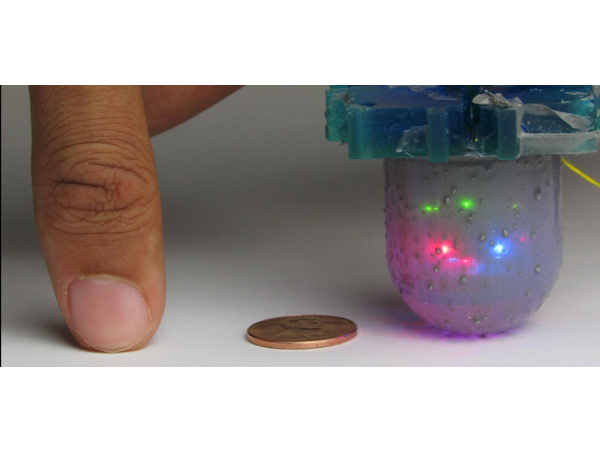
従来のGelSightセンサーでは、センサー自体のサイズが大きすぎたり、センシングの角度が狭かったりといった実用面での課題があった。こうしたなか、カリフォルニア大学バークレー校のAI研究機関BAIRは、コンパクトかつ全方向でセンシング可能な触覚センサーを開発した。
内視鏡用のマイクロカメラ複数台による全方向センシング
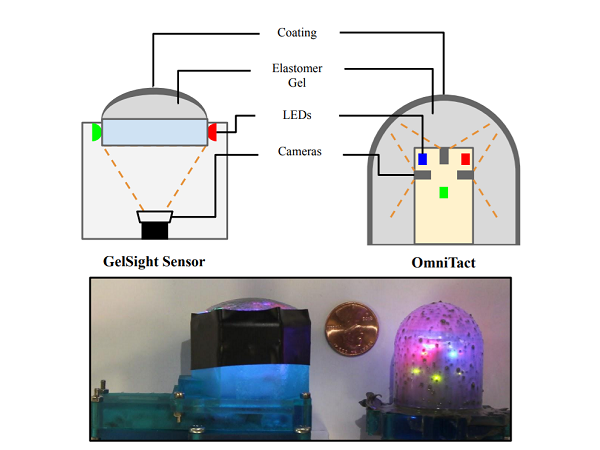
Image: OmniTact: A Multi-Directional High Resolution Touch Sensor/ arXiv
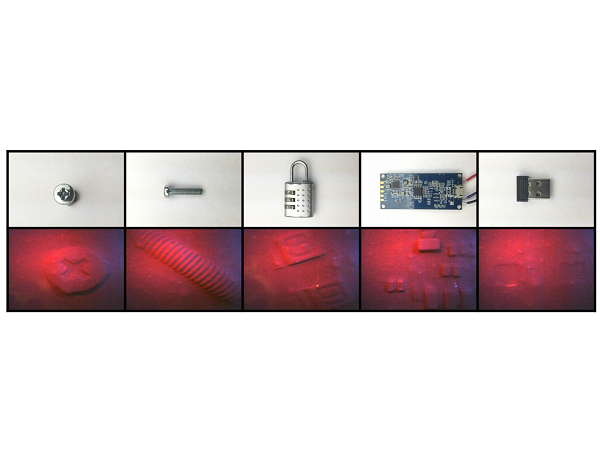
焦点距離が短いカメラで、モノに触れたときのシリコンゲルの変形を直接キャプチャし、そこから形状、材料特性などを推測する。また、センサーは指のような形状をとり、高解像度で視野角の広いカメラが複数台用いられている。
こうした設計により、センサー全体のコンパクト化を実現し、センシングの角度はほぼ360℃をカバーしているようだ。
わずか100回の試行で電源プラグを拾って挿せるようになった
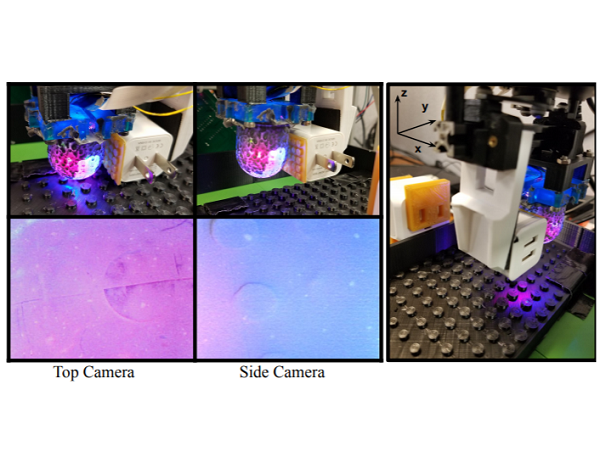
Image: OmniTact: A Multi-Directional High Resolution Touch Sensor/ arXiv
別の多方向触覚センサーを用いた際には、タスクの成功率は17%だったのに対し、複数台カメラのOmniTactでは成功率80%を実現している。
今後研究チームは、OmniTactをより安価でコンパクトにして、幅広いタスクで利用可能にする予定とのこと。
参照元:OmniTact: A Multi-Directional High-Resolution Touch Sensor/ BAIR Blog
OmniTact: A Multi-Directional High Resolution Touch Sensor/ arXiv
- Original:https://techable.jp/archives/124614
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji