

配膳や片付けをしてくれる家庭用ロボットの登場に期待がかかるが、サービスロボットには、自律的にモノを探す能力が不可欠だ。
こうしたなか、ミシガン大学の研究チームは、ロボットがモノを素早くに見つけるための技術を開発した。
「SLiM(Semantic Linking Maps)」と呼ばれるモデルでは、モノ同士の関連性を考慮して検索に役立てる。
モノ同士の関連性や配置を考慮したモデル
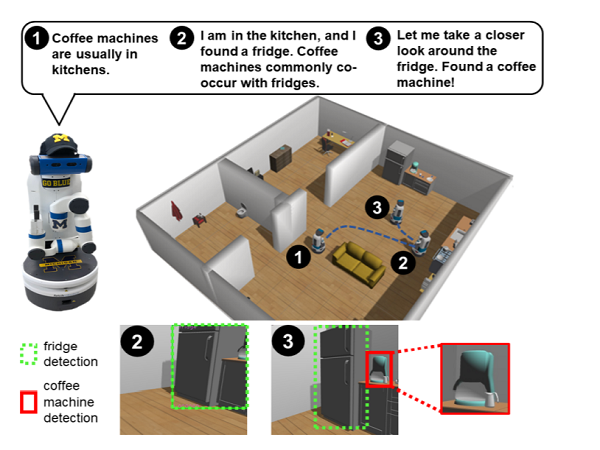
ご家庭の一般的な台所には、冷蔵庫や電子レンジ、調理器具などがだいたい定位置に並んでいるだろう。SLiMは、これらのモノがどう関連し、環境内でどのように配置されるかを考慮したモデルだ。
モデルでは、目印となるモノ(ランドマークオブジェクト)を特定し、周りのモノを関連付ける。検索したいモノがあるときは、ランドマークオブジェクトと、どのように配置されるかの知識を頼りに、素早く探し出す仕組みだ。
ロボットに与えられる知識は、単にモノ同士の距離や位置関係を羅列したものではない。SLiMでは、ランドマークオブジェクト含め、モノが移動するかもしれないとの不確実性も考慮されているようだ。
モノが移動する可能性のある場所を予測
SLiMでは、モノが移動する可能性のある場所を予測するために、モノ同士の関係を確率論的にモデル化する。これによりロボットは、目的のモノかランドマークオブジェクト、どちらかが置かれている可能性が高い場所を探索する。
研究チームは、シミュレーション環境下にて5つの検索モデルの性能比較を実施した。結果、目的のモノかランドマークオブジェクトを検索し、それらが移動された可能性も考慮したSLiM搭載のロボットが、ルート/時間ともにベストな成績だったという。
SLiMを搭載することで、サービスロボットはモノ探しが得意に。ユーザーがロボットのために置き場所を配慮しなければならない事態が避けられそうだ。
参照元:Model helps robots think more like humans when searching for objects/ Michigan Engineer News Center
Semantic Linking Maps for Active Visual Object Search/ Michigan Engineer News Center
- Original:https://techable.jp/archives/129081
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji