

スイス連邦工科大学チューリッヒ校(ETHチューリッヒ)の研究者は、2本のロボットアームの最適な動きを計算するアルゴリズムを開発した。これを適応したロボットアームは、高度に協調して電熱線カッターを操り、プラスチックの塊から複雑な形状を彫り出す。
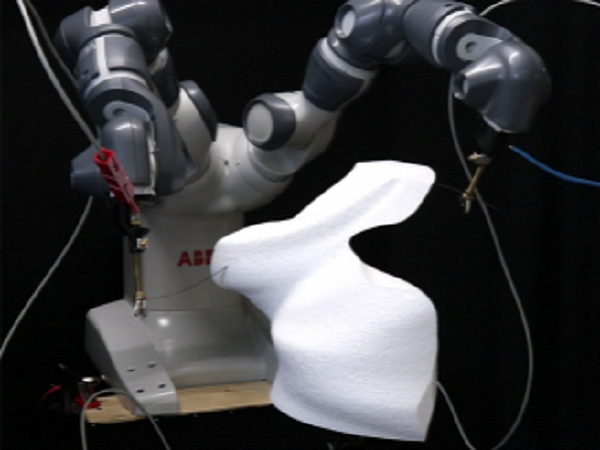
同技術「RoboCut」の検証で、ポリスチレンブロックからウサギを彫り出すことに成功。カット回数は従来のシステムよりもはるかに少なく抑えられたという。
3項目の最適化計算をアルゴリズムに統合
ワイヤーが固定されたシステムでは、直線や円柱などのようにカットのパターンが制限されている。これに対してETHチューリッヒの研究者によるシステムではワイヤーを使った自在なカットが可能だ。
全方向に動く2本のロボットアームと、その動きに応じて曲がるワイヤーの動作計画は、固定されたものに比べて格段に複雑性が増す。
研究者は、ロボットアームの動きに対するワイヤーの形状、ターゲットの形状に近づけるための最適パス、パーツ同士の衝突除外の3項目に関する最適化計算をアルゴリズムに統合した。
10カットでウサギが完成
同システムの最大の利点は、ターゲットの形状を最小限のカットで彫り出せることだ。
ポリスチレンブロックからウサギを彫り出す検証では、わずか10カットだけで作業が完了。ブロックは、2カットを終えたところですでにウサギだと認識できる形状になっている。木彫りのような正確さでウサギを彫る様子は動画にて確認可能だ。
RoboCutは、電熱線カッターによる制作手法の改善だけでなく、ほかのアプリケーションへの展開も考えているという。たとえば同技術を建築に応用することで、コンクリート部品の金型が製造できるとのことで、設計の自由度が増すとともに製造工程が単純化できそうだ。
参照元:A robot that controls highly flexible tools/ ETH zurich
- Original:https://techable.jp/archives/137128
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji