

VR空間で没入感を高めるために触覚を再現が求められている。これまでグローブなどで試みられてきた触覚の再現だが、椅子に座ったりテーブルにモノを置いたりといったインタラクションは実現できなかった。
このほどコロラド大学ボルダー校の研究者は、VR空間内の小道具を動かすとの新たな触覚再現手法を発表している。
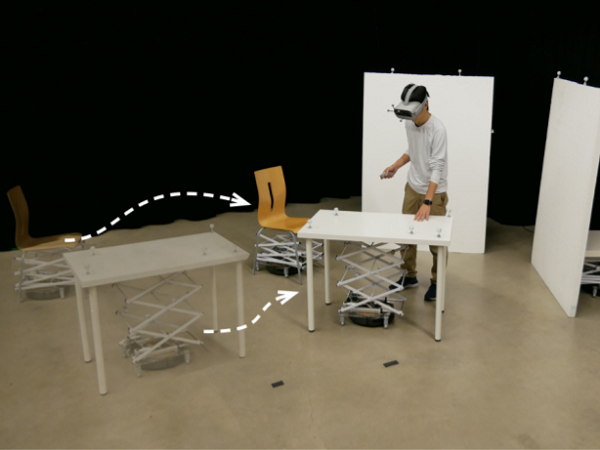
動的触覚環境「RoomShift」では、小道具操作用ロボットを利用してVR空間でのよりリアルな体験を実現する。
小道具に潜って移動
RoomShiftで利用されるロボットは、30cm以上の高さの隙間があり、重さ22kgまでの小道具に潜り込んで移動させることが可能だ。これによりユーザーは、VR空間内の壁に触れたり家具を動かしたりできるようになる。
ロボットはリフト形状のため、小道具の配置してしまえばユーザーが寄りかかったり座ったりしても、本体に体重がかかることはない。
VR空間に変更が加えらると、ロボットがそれに合わせて移動。ユーザーはグローブなどを装着せずにシーン全体を体験できる。
小さな小道具を動かすことで、例えば壁伝いに歩く……といった大掛かりな体験が可能になるようだ(動画で確認できる)。
20台の赤外線カメラを利用したトラッキングシステム
ロボットを正確に制御するには、VR空間すべてをカバーした正確なモーショントラッキングシステムが必要。RoomShiftでは20台の赤外線カメラを利用して、ユーザーやロボット、小道具の位置をトラッキングしている。
ロボットの経路計画アルゴリズムは、現在位置と障害物の位置、目的の位置を利用したシンプルなものとのこと。小道具の高さなどがシステムに事前登録されていて、ロボットが家具の脚に衝突しないような仕組みも導入されている。
VRゴーグル以外のデバイス着用が強いられない同手法は、VR空間での触覚再現に広く採用されそうだ。
参照元:RoomShift: Room-scale Dynamic Haptics for VR with Furniture-moving Swarm Robots/ Ryo Suzuki
- Original:https://techable.jp/archives/139024
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji