

Image: HardwareX
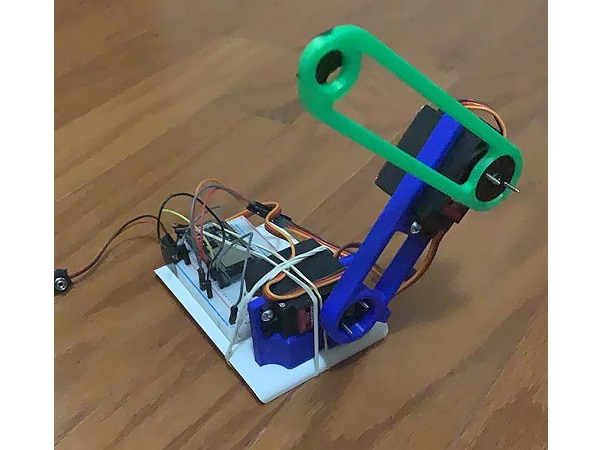
メキシコにあるモンテレイ工科大学の研究者が設計したロボットアームは、低コストで制作でき、IoTインターフェイスを介してネットワーク越しに扱うことも可能だ。
スマホアプリでコントロールできる
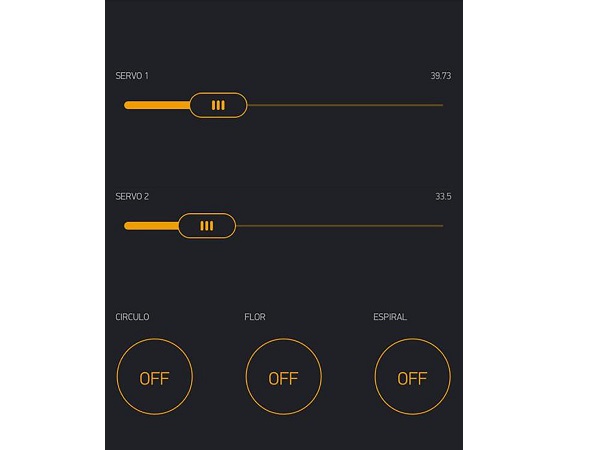
Image: HardwareX
各サーボの角度やアームの位置を決定するために、幾何学的パラメーターを定義する必要があり、軌道のシミュレートにはMATLABが用いられている。研究者は、プログラムをオープンソースとしてアクセス可能にすべく、MATLABコードをArduinoIDE互換に変換した。
スマホとマイクロコントローラを接続できるようにするAndroidアプリ「Blynk」を利用。事前に設定したモーションプロファイルを適用して、スマホからスライダーでサーボを個別に制御できるようだ。
パーツの総コストは3000円以下
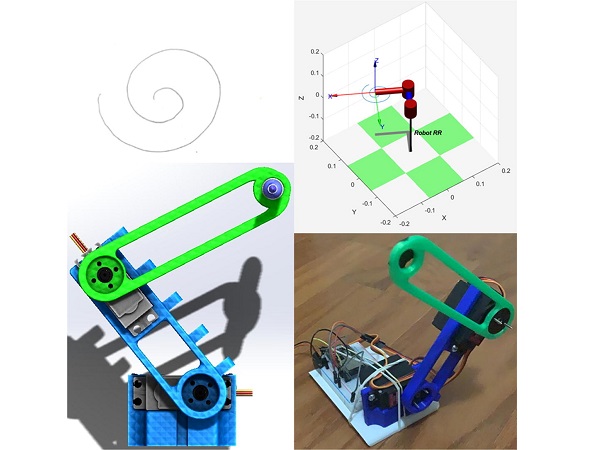
Image: HardwareX
各パーツの購入先リンクも紹介されているほか、CADファイルやArduinoファイル、MATLABファイルなどもダウンロード可能。制作方法や逆運動学の導出方法などについても解説してくれている。
こうした情報は、HardwareXにて公開の論文にアクセスして利用可能だ。
- Original:https://techable.jp/archives/144986
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji