

粒子や動物の群れがいつどのように集まるかを予測することは、依然として科学的、工学的な課題だ。
原子が規則正しく配列し、結晶を形成するようなシンプルなシステムとは違い、自発的に動く粒子に見られる集団運動は予測が困難。鳥の群れ、細菌のコロニー、ロボットの群れなどで見られるこの手のシステムは、「アクティブマター」と呼ばれている。
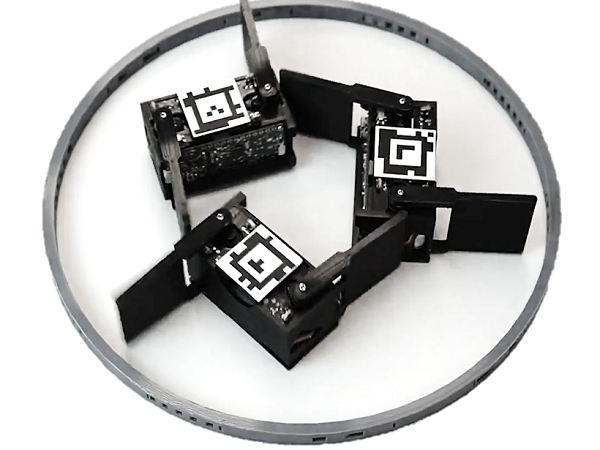
こうしたなか、ジョージア工科大学(ジョージアテック)の研究者らは、アクティブマター発生の仕組みを考案。「smarticles」と呼ばれる周期的に形状が変化するロボット群でこの理論を実証している。
システムが自発的に高度な編成状態に遷移
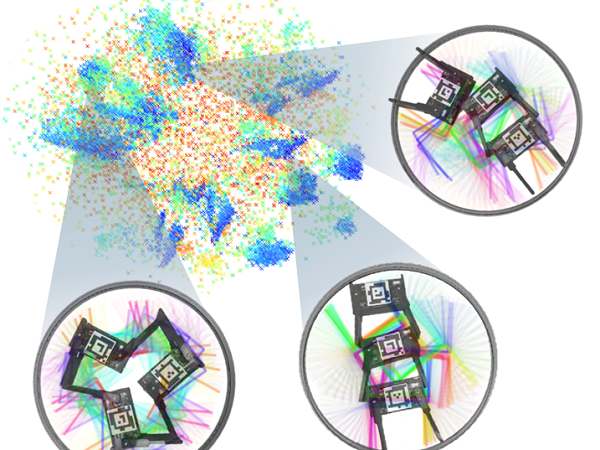
研究者らは、物質がエネルギーを受け取り、ランダムな動きに変えることを「ラトリング(活発な)」と呼んでいる。動きがより激しくなるか、よりランダムになれば「高ラトリング状態」、反対に動きがわずかか高度に編成されていれば「低ラトリング状態」だ。システムは自発的にラトリングの余地を見つけてはランダムに再配置し続け、低ラトリング状態に遷移するという。
この理論は、スイスの物理学者シャルル・ソレーによって発見された現象「熱泳動」からインスピレーションを得たもの。ソレーは、塩の水溶液に温度勾配を設けると、塩が高温領域から低温領域に移動することを発見した。
バタつきロボットで理論を実証
Credit: Thomas A. Berrueta
例えば、1つのダンスは3台のロボットが順番にアームをはたき合うもの。ダンスは何百回ものはたき合いの間持続する可能性があるが、突如として安定性を失い、別のパターンのダンスが始まる。
シンプルなダンスで低ラトリング状態を実証した後に、研究者らはより洗練されたsmarticlesを開発。smarticlesのバタつきパターンに応じてダンスの種類と数がどのように変化するか、どのように制御できるかなどを検証した。
研究結果は、マイクロロボット群やメタマテリアルなど幅広い研究領域で応用できる可能性があるとのこと。
参照元:Spontaneous Robot Dances Highlight a New Kind of Order in Active Matter/ GeorgiaTech News Center
- Original:https://techable.jp/archives/145997
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji