

ソフトロボットは、その柔軟性から繊細なモノが扱え、形状が変形することでさまざまな環境に適応できる。また、耐久性もあることから、制約のある環境下での救助や調査なんかでの活用が期待されている。
ただし、現時点で開発されている多くのソフトロボットは外部電源を必要とし、バッテリー駆動のものに関しては動きの遅さが課題となっていた。こうしたなか、ジョンズ・ホプキンス大学の研究チームは、リモート制御できて反応速度的にも有利なソフトロボットを発表している。
Bluetoothで接続して制御
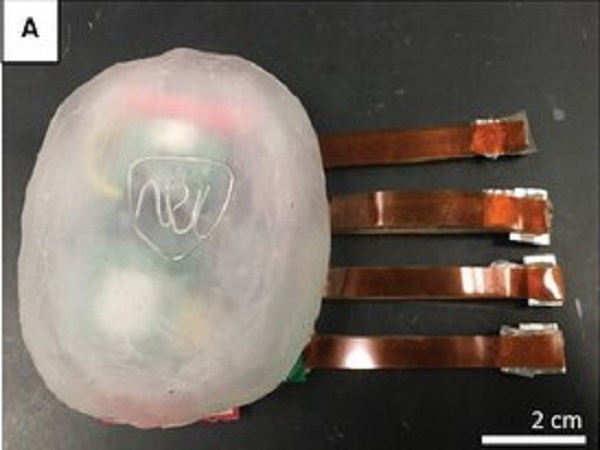
研究チームが設計したカタツムリのようなロボットは、大きなシェルと脚の役目を果たす4本のストリップで構成されている。ストリップはゴムのように弾性を持つ材料「液晶エラストマー(LCE)」でできていて、人工筋肉として用いられるこの材料は、熱を加えると変形し、熱を取り除くと元に戻る。
シェルには、マシンのコントロールパネルとバッテリーが格納されていて、電流によって熱を誘発することで動く。
Bluetoothで接続して制御し、iPhoneから脚を加熱して前に進むよう指示できるようだ。
分速1.27cmで移動
LCE駆動のロボットでは反応速度が問題になってくるが、今回研究チームは工学的アプローチによってこれを改善している。
論文によれば、55gのソフトロボットは毎分1.27cmで移動し、1400gの荷物を運ぶことができたとのこと。
研究者は技術の組み合わせの重要性を強調。材料設計とともにシステム設計およびその相互作用を研究することで、継続的にソフトロボットの動作を改善することを提案している。
参照元:Applied Physics Lab researchers develop advanced soft robots/ Johns Hopkins University Hub
An Untethered Soft Robot Based on Liquid Crystal Elastomers/ Soft Robotics
- Original:https://techable.jp/archives/147181
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji