

ロボットの群れを完璧に制御するとなると、高度なプログラミングやセンサー、通信が必要になります。ジョージア工科大学(ジョージアテック)の研究者らは、こうした複雑な解決手段を除外して、ロボットを協調させようと試みています。
粒状体の物理学のパイオニア、Bob Behringerにちなんで名づけられた「BOBbot」は、シンプルな造りにも関わらず、ロボット単体では成し得なかったタスクを集団で達成できることが示されました。
センサーや計算なしでの集団行動を実現
研究者らの目的は「非常にシンプルなロボットで、どんな複雑なタスクを実行できるかを見ること」にありました。
ジョージアテックでは、以前にも「Smarticles」と呼ばれるマイクロボット群で、鳥の群れや細菌のコロニーなんかに見られる集団運動のランダム性を再現しています。
Smarticlesが、Arduino Pro Miniや光/音センサーなどで構成されていたのに対し、BOBbotでは、センサー、通信、メモリ、計算を取り除くことができました。
磁気の相互作用を利用
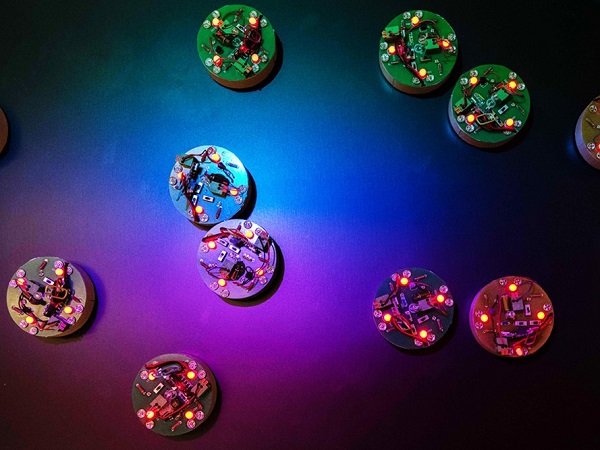
BOBbotでは、円筒形のシャーシにモーターと振動ブラシを備え、ロボット内部のスペースにはマグネットビーズが置かれています。このマグネットビーズによる磁気の相互作用を利用して機能。近隣のロボットと近づきやすくなります。
研究では、磁気相互作用が増加するにつれて、分散していた個体が大規模な集合体へと急激に変化することが証明されました。
ロボットが動き回って互いにぶつかるうちに、単体では移動できないほど重たいモノを運べるようになったようです。
なお、ロボットが集合体を形成してモノを運ぶ様子は動画で確認できます。
参照元:Simple Robots, Smart Algorithms: Meet the BOBbots/ Georgia Tech News Center
(文・山田洋路)
- Original:https://techable.jp/archives/154183
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji