

火星探査で活用される技術が、深海の調査にも役立てられているようです。
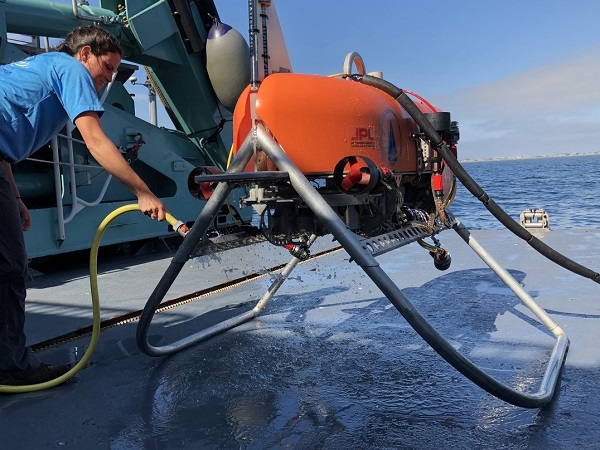
米国海洋大気庁(NOAA)の自律水中車両研究部門が主催し、アメリカ東海岸沖で水中調査ロボット「Orpheus(オルフェウス)」のデモンストレーションが実施されています。
Orpheusには、NASAジェット推進研究所(JPL)が開発したビジョンベースのナビゲーションシステムが搭載されています。
火星探査機「Perseverance」の着陸を支援した技術
一般的な深海潜水艇、はソナーのようなおおがかりな位置検出装置に頼って、海底付近の暗く濁った領域を航行します。Orpheusに関しては、カメラとライト、高度なソフトウェアで構成されていて低電力で軽量。人間の助けを借りず、最深の海域でも自由に航行できるようです。
こうした離れ業を可能にしている技術がビジョンベースのナビゲーションで、NASAの火星探査機「Perseverance(パーサヴィアランス)」の正確な着陸を支援した「地形相対ナビゲーション」の別バージョンになります。
探査機が火星地表に着陸するにあたっては、いわゆる“恐怖の7分間”を乗り切る必要があります。この間、通信のタイムラグから、地球上の管制センターによる制御は無効で、さまざまなセンサーを駆使した自律的な調整が行われます。このときカメラにより火星の風景をマッピングし、安全な場所を選択するのが地形相対ナビゲーションです。
将来的にはチームで“超深海帯”を航行
なおビジョンベースのナビゲーションシステムは、火星ヘリコプター「Ingenuity(インジェニュイティ)」でも活用されていて、飛行中これにより地表の特徴を追跡しているようです。
今回の技術デモは、地形相対ナビゲーションの海での実行可能性を検証するとの目的があります。
最終的に水中調査ロボットは、チームを編成して6000mより深い“超深海帯”を航行できるように。海底の広大な未踏領域の3Dマップを作成する計画です。
参照元:Robotic Navigation Tech Will Explore the Deep Ocean/ NASA JPL
(文・山田洋路)
- Original:https://techable.jp/archives/154766
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji