


カシオ計算機株式会社は、独自の「カメラ可視光通信」を活用した位置測位システム「picalico(ピカリコ)」を2019年3月より提供しています。このシステムは、JAXAの宇宙探査イノベーションハブが2020年6月~7月に実施した「第6回研究提案募集」において、月面を移動する探査車などの自動制御のための位置計測・推定技術および自動・自律型探査技術として採択。そして、カシオとJAXAは、「picalico」による測位実験を開始しました。
ちなみにJAXAは、2030年代以降に月面インフラを構築し、持続的な探査を目指す構えですが、当面は月に衛星測位システム(GNSS)がないことを想定しているため、電波を必要としない「picalico」が採択されたと思われます。
「picalico」による位置測位
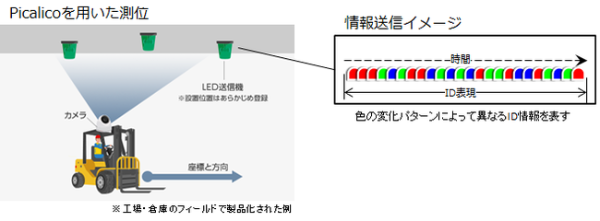
色の変化で信号を伝える「可視光通信」のため、電波が使えない場所での無線通信手段としても有効。さらに、電波方式の測位で問題となる環境の変化などの影響によるブレが生じないのも特徴でしょう。
「picalico」による位置測位には、「カメラ移動型測位」と「カメラ設置型測位」があります。カメラ移動型測位は、自由度の高い低価格なLEDを設置してカメラの位置を推定する方法。一方、カメラ設置型測位では、カメラの広い画角を利用して、同時に複数の移動するLEDの位置を推定することができます。
野球場をクレーターに、トラクターを探査車に見立てて
そんな「picalico」を活用した位置測位の実証実験が、神奈川県相模原市のサーティーフォー相模原球場にてスタート。期間は、2021年11月29日~12月3日です。

なお、実験は一般には非公開で行われますが、JAXA宇宙探査イノベーションハブのTwitter(@JAXA_TansaX)に実験の模様が投稿されるようです。
(文・Higuchi)
- Original:https://techable.jp/archives/167609
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:樋口