


トヨタ自動車株式会社と国立研究開発法人宇宙航空研究開発機構(JAXA)は、2019年より、月面でのモビリティとなる有人与圧ローバを開発中。2020年8月に、この有人与圧ローバの愛称を「LUNAR CRUISER(ルナ・クルーザー)」と命名し、2029年の月面への打ち上げを目指して開発を進めています。
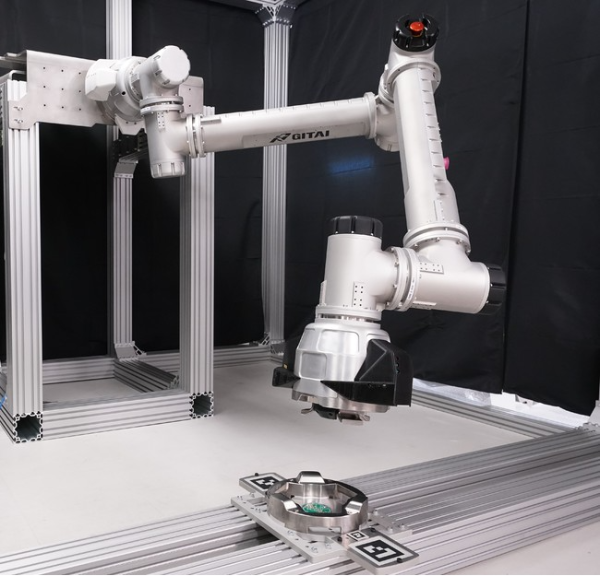
そして2021年6月、トヨタとGITAI Japan株式会社は、「LUNAR CRUISER」向けのロボットアームを開発すべく、共同研究契約を締結。GITAIは同契約に基づき、ロボットアームのブレッドボードモデルの開発に着手し、このたび開発中の試作機を公開しました。
広範囲で複数の仕事を遂行するロボットへ
月面での探査・点検などの多様な作業をこなす汎用的なロボットを実現するには、複数の仕事を遂行できる「タスク性能」と、広範囲で仕事を実行できる「移動性能」が必要だといいます。現在GITAIは、この2つの性能を「LUNAR CRUISER」に付与できるロボットアームとさまざまなエンドエフェクタ、ローバ壁面に取り付け可能なインターフェースを開発中です。



「LUNAR CRUISER」のこれまでとこれから
こうしてロボットアームの開発が進む「LUNAR CRUISER」は、2020年度に各部品の試作や試作車の製作が行われました。このとき、シミュレーションによる走行中の動力や放熱の性能確認、タイヤの試作・走行評価、VRや原寸大の模型を活用した内部の機器配置の検討などが行われたようです。
そんな「LUNAR CRUISER」に搭載できるロボットアームがついに試作機公開の段階にまできました。今後は、複数かつ広範囲に作業を実施するための自律制御技術、低重力・真空・極低温~高温・レゴリスと言った月面特有の砂や激しい放射線など超過酷環境への対応などに取り組むとのこと。
また、GITAIとトヨタは、JAXA・トヨタ・三菱重工業株式会社の3者が幹事会社を務める「有人与圧ローバが拓く“月面社会”勉強会(通称:チームジャパン勉強会)」の参画企業とも連携し、「LUNAR CRUISER」への搭載だけでなく、将来の月面でのさまざまな活動における汎用的ロボットシステムの開発を目指していく構えです。
(文・Higuchi)
- Original:https://techable.jp/archives/168931
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:樋口