

ロボットと聞くと、ぎこちない動作を想像する人もいるでしょう。しかし、そうしたイメージを覆すようなロボットハンドをスタンフォード大学のエンジニアチームが開発しました。
なんと、「指」で卵やトマトなどをつかめる「FarmHand」です。やわらかいものをつかむには力の微妙な調整が必要ですが、ヤモリに着想を得たグリップによって実現しました。
均一な力加減
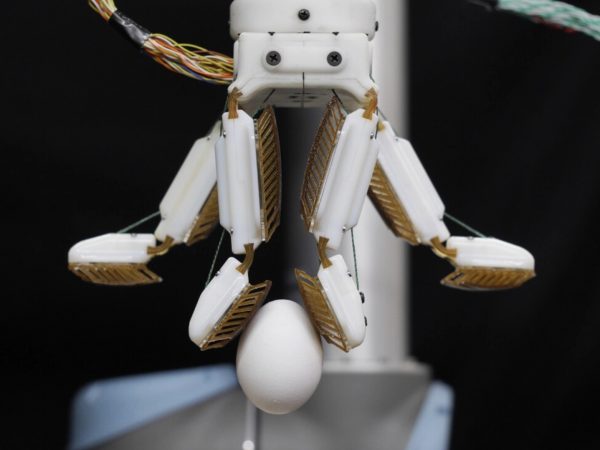
ヤモリは壁や天井に張り付く能力を持っていますが、それは粘着質な手足のおかげです。スタンフォード大学のエンジニアチームはヤモリを参考にして、ロボットハンドが物をつかめるよう、4本の指先にエストラマーパッドを付けています。
FarmHandは物をつかむ際に、物に触れるパッドに均一に力をかけることができ、また「指」には関節もあります。これによりフラットでない物、そして壊れやすい物もつかむことができ、「握りつぶす」ことはありません。
バスケットボールもつかめる

つまりFarmHandは、人間が無意識にこなしている「落とさないようしっかりと持つ」ことと、「ダメージを与えないようにそっと持つ」ことの両方をこなす能力を持っています。
開発チームは今後、FarmHandの改良を重ね、商業化も視野に入れているようです。たとえば収穫した果物の選果や箱詰めなど、名称にある通り農業分野はもちろん、その他の産業でも活用できそうです。
(文・Mizoguchi)
- Original:https://techable.jp/archives/169306
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:mizoguchi