

国立研究開発法人情報通信研究機構(以下、NICT)は、ドローン同士がそれぞれの位置情報を直接通信するシステムを応用し、4機のドローンによる自動追従群飛行と自律接近回避の実証に成功しました。
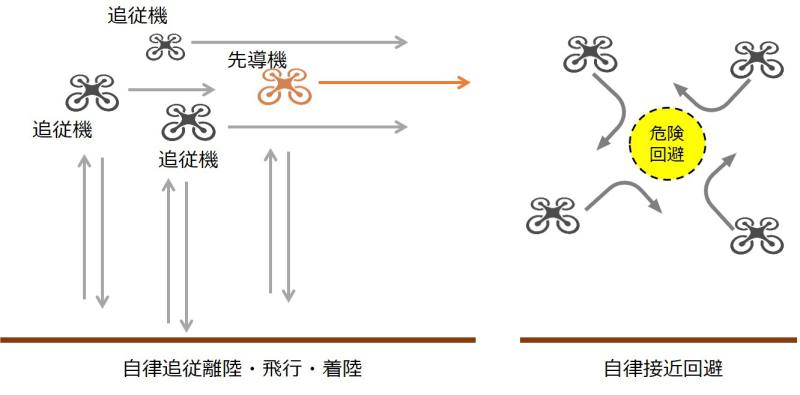
先導するドローンに3機のドローンが一定の間隔を保って追従する群飛行技術、および同一の空域に4機のドローンが飛行しながら自律的に相互の接近を回避するシステムの実証実験に成功したのは、これが世界初とのことです。
ドローン同士が位置情報をキャッチする「機体間通信システム」


これを各ドローンの飛行制御装置に接続し、ドローン同士が相互に連携することを可能にしました。
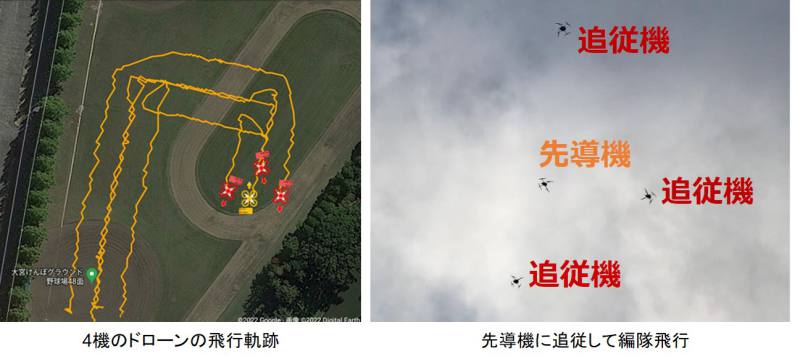

実験では、3機のドローンが先導機のドローン1機に追従し、編隊を維持しながら飛行しました。また、4機が方向を変えて接近を回避した後、予定していた経路にそれぞれ復帰する様子を確認できたといいます。
レベル4実現へ向けて


そしてこのたび、4機のドローンによる自動追従群飛行と自律接近回避の実証に成功。NICTは、目視外飛行にあたって同システムを活用することで、ドローン運用の効率化や電波の有効利用にもつながるとしています。
ドローンと有人ヘリコプター間でも利用可
今回の実験で使用したシステムは、ドローン間だけではなく、ドローンと有人ヘリコプターの間でも利用できるとのこと。同実験では、数kmの距離を隔ててヘリコプターが接近した場合に、ドローンが自律的に接近を回避することも実証しています。
今後は、複数のドローンの安全な同時飛行による物流や広範囲の農薬散布、災害対策など、さまざまな分野への応用が見込まれます。
NICTは今回の成果をもとに、さらに多くのドローンが同一の空域内を飛行する場合に対応した通信制御方式・飛行制御方式の検討や、飛行する環境に応じた編隊の隊形にするといった群飛行技術・通信技術の高度化を進め、同方式の実用化を目指す方針です。
(文・Haruka Isobe)
- Original:https://techable.jp/archives/176908
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:はるか礒部