狭いスペースでも活動できたり、モノを持ち上げたり、といった柔軟な性質からソフトロボットが注目されている。
ただ残念なことに、シャクトリ虫やイモ虫のように進むソフトロボットには移動速度の面でハンディがある。これにチーターの能力を実装したというのが今回のノースカロライナ州立大学による研究だ。
チーター化したソフトロボットは、速く移動できるだけじゃなく、速く泳げて、より重たいモノを持ち上げることもできるようになったという。
屈曲で蓄積したエネルギーを地面に解放
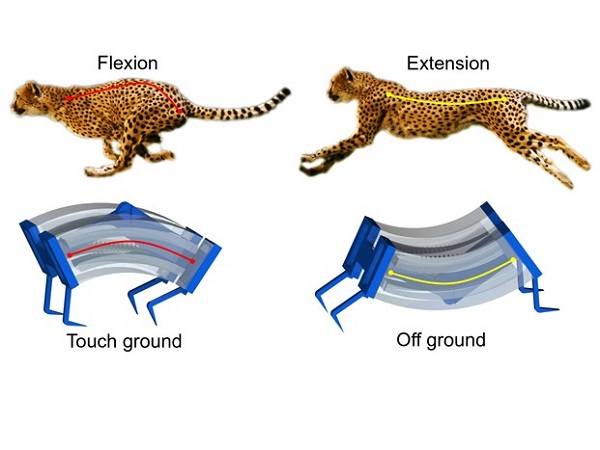
ノースカロライナ州立大学の研究チームは、チーターにインスパイアされて、あのギャロッピングの動きをソフトロボットで再現しようとした。そのために、バネ式の背骨を開発し曲げ伸ばしすることで、安定/不安定な状態を切り替える。
状態の変化が急速に起こることで、エネルギーを蓄積してから解放。これを地面に伝えて移動に利用する。地面に移動のエネルギーが伝わると足が地面から離れ、ソフトロボットのギャロッピングが実現だ。
従来の3倍以上の速度で移動
従来の地を這うソフトロボットは、最大0.8体長/秒の速度だったのに対し、ギャロッピングできるソフトロボットは最大2.7体長/秒の速度で移動できた。
また、水中の移動でもこの仕組みでパフォーマンスが向上。従来のソフトロボットの泳ぐスピードが最大0.7体長/秒だったのに対し、今回開発のものは0.78体長/秒で泳げた。さらには長さ約7cm、重量約45gのこのソフトロボットは、複数で協働することで10kg以上のモノを持ち上げられるという。
ギャロッピングの能力を備えることで、ソフトロボット利活用の幅がうんと広がりそうだ。
- Original:https://techable.jp/archives/124127
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...