研究用途で飛行する昆虫を分析するのはむつかしい。一般的に、狭い空間に閉じ込める、ホバリングさせる、装置を取り付ける、動きを刺激で操作する…といった手法がとられているようだが、いずれも動きに制限がかかってしまう。
こうしたなか、フランスのロレーヌ大学の研究チームは、飛行する昆虫の動きに合わせて動くケーブルロボットを開発した。
「Lab-on-cables」と名付けられた同ロボットは、秒速3mの速さで自由に飛ぶ昆虫の動きが捉えられる。
昆虫の3次元座標を計算し6DoFで追尾
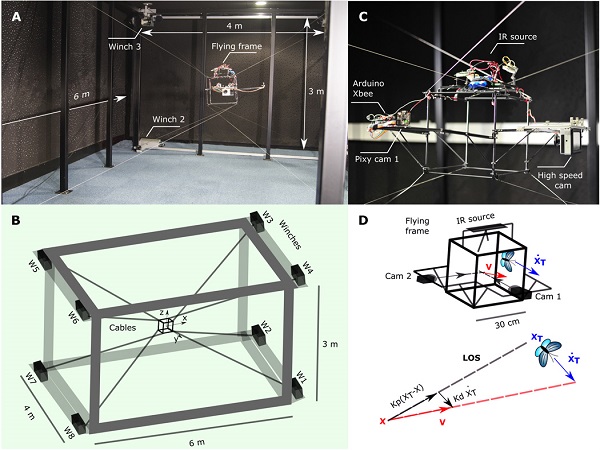
研究チームの開発したシステムでは、ケーブルでつながれた1辺30cmのキューブが、その中で飛ぶ昆虫とともに移動する。
飛行中の昆虫の位置と、ロボットの位置のズレが最小限になるよう計算し、6自由度(DoF)で追尾可能だ。
その際、ロボットに搭載された2台のカメラシで画像をキャプチャして外部コンピュータに送信。昆虫の3次元座標を計算している。
ターゲットに合わせて断続的に速度を調整
昆虫の追跡は、ミサイル誘導システムで使用される技術を参考にしており、ミサイルはターゲットの迎撃すべく最大速度で飛行するのに対し、昆虫を追跡するケーブルロボットは、ターゲットに合わせて断続的に速度を調整し続ける。
ショウジョウバエや蚊、蛾など、さまざまな昆虫で事前テストを実施。以前の研究で記録された飛行の軌跡を使用しシミュレーションした結果、昆虫を追跡できる可能性が示された。
さらに、実際の蛾による検証では、搭載された高速カメラで動きが分析できたとのこと。
軽量のケーブル構造により、空気の乱れがほとんどない。将来的には動きを高速化し、より広いスペースに展開できる可能性がある。
参照元:Automatic tracking of free-flying insects using a cable-driven robot/ Science Robotics
- Original:https://techable.jp/archives/127869
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...