ペンシルベニア大学およびコーネル大学の研究者らは、細胞サイズのロボットを制作している。半導体でできていて電気信号で制御できるロボットとしては最小クラス。ゾウリムシとほぼ同じ大きさとのこと。
同ロボットは小さすぎて肉眼で見ることができない。そのため、組み立てと制御には顕微鏡が必要だ。この技術を発展させることで、血流のなかを移動して治療に利用できるようなマイクロボットが開発される可能性がある。
4インチシリコンウェーハに100万個が納まるサイズ
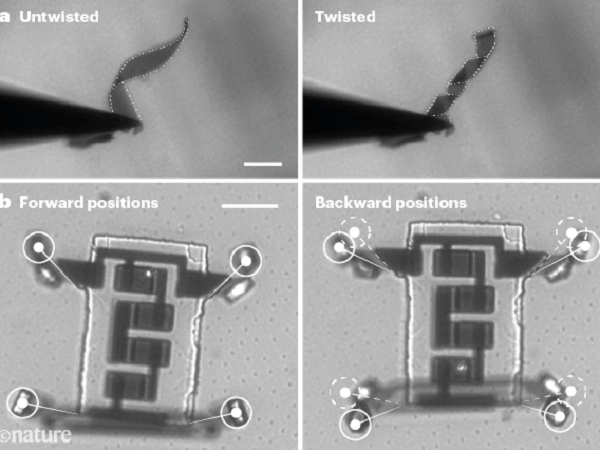
研究者らによるマイクロボットは、シンプルな回路として機能する胴体と、アクチュエータとして機能する4本の脚で構成されている。
長さ40~70ミクロン、幅40ミクロン、厚さ約5ミクロンとなっており、標準的な4インチシリコンウェーハにおよそ100万個が納まるサイズだ。にもかかわらず、搭載される回路は、通常のコンピュータチップのようにシリコンをエッチング加工したものだ。
脚は、わずか原子数十個分の厚さのプラチナ板でできており、電圧をかけると曲がる。
太陽光発電で得たレーザー光を動力に
太陽光発電で得たレーザー光を使ってロボットを制御。それぞれの脚を別々に動かすことで歩行が可能になる(ロボットの歩行の様子は動画で確認できる)。
最高速度は秒速30ミクロンとなっていて、いまのところそれほど高速ではなく、演算処理性能も高くない。研究者らは、微生物のシステムを真似て、今後ロボットの歩行を最適化できると考えているようだ。
このロボットの強みとしては大量生産が可能なこと。今回開発された技術が発展することで、将来的には害虫駆除やがん細胞の検出に役立つマイクロボットが登場することを願う。
- Original:https://techable.jp/archives/136502
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...