家庭や工場、店舗などでモノをピッキングするロボットの活躍が期待されている。オープンで構造化されていない作業領域を前提とするロボットの研究が主流ななか、カリフォルニア大学バークレー校の研究者らは、作業領域を棚やクローゼットなどに絞ってピッキング精度の向上を図った。
研究者らが開発の「LAX-RAY」と呼ばれるシステムは、棚にある隠れたオブジェクトの検索を自動化する。
効率的に棚のターゲットにアクセス
スペースに制限のある棚やクローゼットでは、奥のモノを取ろうとするときに手前のモノを動かす必要がある。なかには、ターゲットがほかのモノに隠れて見えないこともあるだろう。
そこで研究者らは、棚の上のモノを探し出し、ターゲットにアクセスするパスを決定するシステムを開発している。邪魔になっているモノは横に押して移動。一連の作業をできるだけ安全で効率的に行うようトレーニングされた。
作業の成功率87.3%を達成
研究者らは、単純な配置からより複雑な配置まで、800のランダムな仮想環境にてシミュレーションを実施。87.3%の成功率を達成している。また、実際のロボットと、画像と深度を取得するためのRGB-Dカメラを使用したテストでも80%以上の成功率を示した。
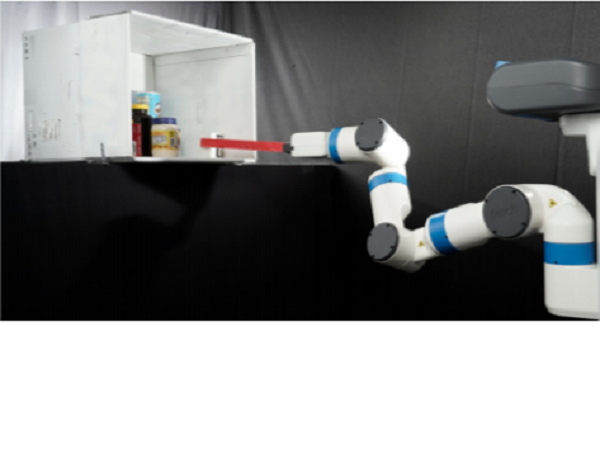
動画では、棚の奥にあるターゲットを認識し、さえぎっているモノを移動させてアクセスするロボットの様子がうかがえる。
同システムの精度がさらに向上し適用可能となれば、薬局や雑貨店などでの商品の取り出しを、ロボットに任せられるようになるかもしれない。
参照元:Mechanical Search on Shelves using Lateral Access X-Ray (LAX-RAY)/ LAX-RAY
- Original:https://techable.jp/archives/143523
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...