
完全自動運転車の走行はセンサーが頼りだ。周囲のオブジェクトを検出するのにはLiDARセンサーが有用だが、大雨の中では性能が低下するとのシミュレーション結果が示された。
ウォーリック大学の研究者は、実際の道路や天気を想定した環境でテストできる3Dシミュレーターを使用。雨天時のLiDARセンサーの性能を評価している。
さまざまな降雨量のモデルでセンサー応答を測定
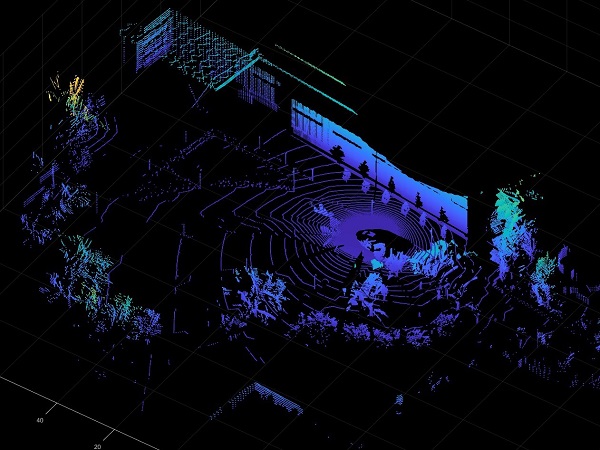
Credit: WMG, University of Warwic
オブジェクトからの反射を検出するLiDARセンサーの課題の1つに、雨によるパフォーマンス低下がある。近距離にある雨粒がビームを反射し、センサーは物体として検出してしまう。また雨粒は、光の一部を吸収する可能性があり、センサーの性能低下につながるという。
研究者は3Dシミュレーターにて、さまざまな降雨量のモデルでセンサー応答を測定。誤検出を記録した。
降雨量が増すにつれてセンシング性能が低下
シミュレーション結果から研究者は、降雨量が増すにつれてセンサーのオブジェクト検出がむつかしくなることを発見。車両からの近距離(最大50m)で雨粒による誤検出が多く発生した。
中距離(50~100m)では誤検出が減少したものの、降雨量が1時間あたり最大50mmになると距離が長くなるにつれてオブジェクトの検出がむつかしくなったとのこと。
同研究結果およびモデルは、ノイズの多い環境でもオブジェクトを検出するためのセンサーの設計に役立てられる可能性がある。
参照元:Heavy rain affects object detection by autonomous vehicle LiDAR sensors/ University of Warwick
- Original:https://techable.jp/archives/149805
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...