
NASA Liveで宇宙飛行士が作業する様子を観るのを楽しみにしている方もいるのではないでしょうか。国際宇宙ステーション(ISS)の船外作業では、ロボットアームが重要な働きをしてくれます。
7月21日(中央ヨーロッパ時間)には、ヨーロッパ製のロボットアーム「ERA(欧州ロボットアーム)」が多目的実験モジュール「ナウカ」と共にがISSに向けて打ち上げられる計画です。
打ち上げはカザフスタンのバイコヌール宇宙基地から実施され、ISSのロシア区画に設置されることになります。
「Canadarm2」と「JEMRMS」に続くロボットアーム
Credit: ESA
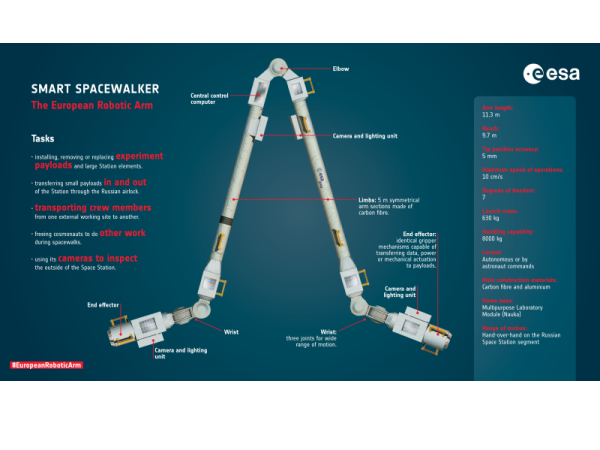
ERAはアーム長が11.3mとなっており、サッカー場でいえばペナルティエリアのボールをゴールキーパーに手渡すことができるサイズとのこと。人間の腕と同じように肩や肘、手首に相当する部分を備えています。ISSの複数の位置に固定できて、広い範囲で移動するようです。
これまでも、カナダの「Canadarm2」と日本実験棟の「JEMRMS」の2機のロボットアームが、船外でのペイロードの移動なんかで活用されてきましたが、設置システムのタイプが異なるロシア区画では利用できなかったようです。
ERAはISS内からだけでなく船外からも宇宙飛行士が制御できる点で、ほかのロボットアームと異なります。もちろん事前にプログラムすることで、タスクの自動実行も可能です。
多目的実験モジュール「ナウカ」で活躍
ERAは、ISSのロシア区画に設置される多目的実験モジュールを本拠地として活躍します。最初のタスクは、エアロックを設定し、多目的実験モジュール用の大型ラジエーターを設置することです。
打ち上げから1週間後にはISSに到着し、宇宙飛行士の5回の船外作業によりセットアップされます。
打ち上げの様子は、日本時間の7月21日23時30分から、ESA Web TVでライブ配信される予定です。
参照元:A European Robotic Arm to handle the Space Station/ ESA
(文・山田洋路)
- Original:https://techable.jp/archives/158461
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...