ドイツのマックスプラックインテリジェンスシステム研究所(Max Planck Institute for Intelligent Systems:MPI-IS)は、犬型ロボットを開発しました。
コンピューターが失敗を感知して修正するよう作られた同ロボットは、わずか1時間で歩行できるようになりました。
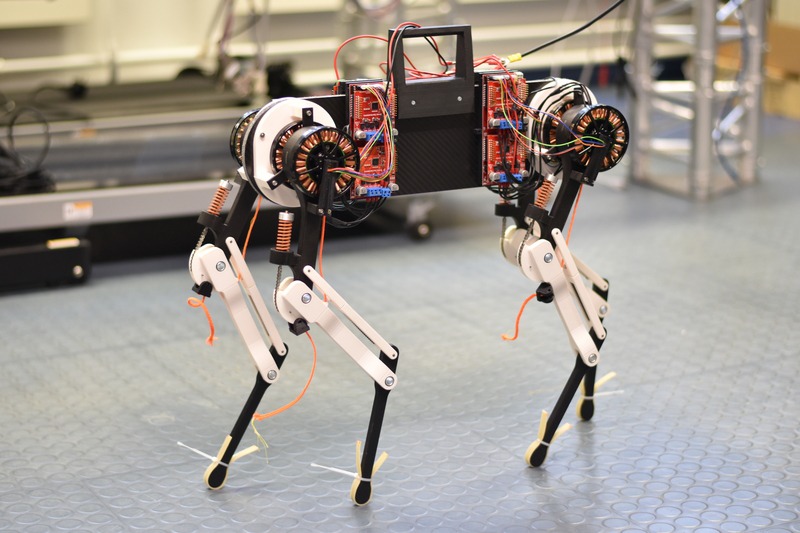
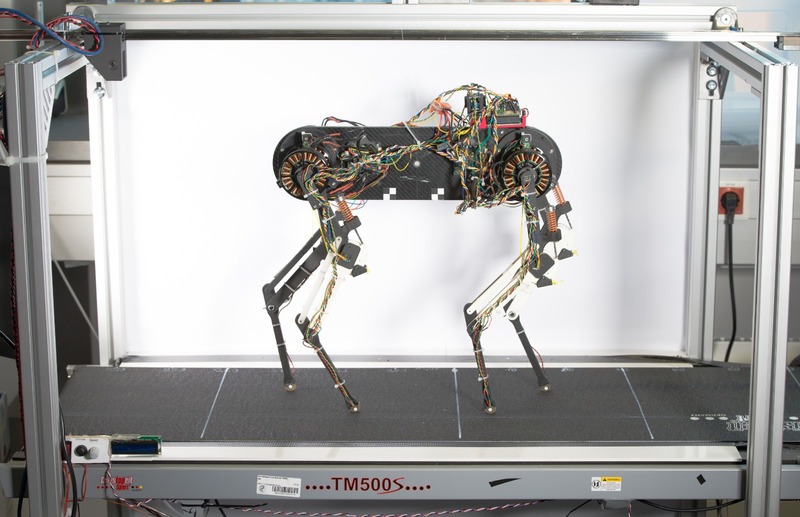
4足歩行の犬型ロボット「Morti」
 MPI-ISは、複雑な環境とうまく相互作用する自律システムにおける知覚、行動、学習の原理を理解し、この理解を将来のシステム設計に役立てることを目標に様々な研究をおこなっています。
MPI-ISは、複雑な環境とうまく相互作用する自律システムにおける知覚、行動、学習の原理を理解し、この理解を将来のシステム設計に役立てることを目標に様々な研究をおこなっています。
同研究所のAlexander Badri-Sprowitz博士と博士課程の学生であるFelix Ruppert氏は、動物が生後、どのように歩行を学ぶのかを調べるため、4足歩行の犬型ロボット「Morti」を開発しました。
歩行学習プロセス解明をアシスト
生まれたばかりの動物は、脊髄に筋肉の調整ネットワークを備えている一方で、正確に調整する方法は学ぶ必要があります。学習には時間がかかり、最初は脊髄の反射神経に頼ることになるといいます。
この反射は動物が最初のトライで転倒して怪我をするのを防ぐ役割を担いますが、神経系が足の筋肉や腱に適応して、より正確な動きを学ぶには時間がかかります。研究者たちは、この学習プロセスを解明しようとMortiを開発しました。
アルゴリズムを使って動物よりも早く学習
Mortiは、生まれたばかりの子鹿やキリンなどの動物が、初めて歩く際に上手く立てずに、躓いてしまうのと同じように躓きます。
動物が歩行をマスターするのに長い時間を費やすのに対して、アルゴリズムを用いて学習を誘導したMortiはわずか1時間で歩行可能になりました。
「生きている動物の脊髄を研究することは容易ではありません。この研究は、ロボット工学と生物学の接点にある基礎研究です。ロボットモデルは、生物学だけでは答えられない質問に答えを与えてくれます」と、Alexander Badri-Spröwitz氏は述べています。
(文・K.Taichi )
- Original:https://techable.jp/archives/183562
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:kurawakataichi
Amazonベストセラー
Now loading...