
GITAI Japan株式会社(以下、GITAI Japan)は、宇宙ステーションや地球軌道、月面・火星など、宇宙向け汎用作業ロボットの研究開発と、宇宙空間でのロボットによる労働力提供を目指す日本発のスタートアップ企業です。
今回、同社は米国法人のGITAI USA Inc.とともに総額40億円(約 3,000 万米ドル)の資金を調達しました。
宇宙飛行士の負担、輸送コストの課題
月面資源開発や火星探査、ISS(国際宇宙ステーション)の商業化など宇宙開発が加速する中、新たな宇宙ステーションや月面・火星基地の建設など宇宙空間におけるさまざまな作業の急増が見込まれています。
しかし、こうした作業は、人体へのリスクを抱えながら宇宙飛行士が行っているのが現状であり、そのための育成や輸送に莫大なコストが発生しているようです。
GITAI Japanでは、宇宙飛行士の負担・リスクを軽減するとともに宇宙空間作業にかかる輸送・育成などの総コストを大幅に削減する“汎用作業ロボット”を開発しています。
今回の資金調達により、パートナー企業が輸送手段を提供し、GITAI Japanが作業手段を提供することで、宇宙における作業コストの引き下げを実現するとのこと。
月面で探査・採掘・点検するロボット
GITAI Japanらは、今回調達した資金の具体的な使い道として、月面ロボット探査機およびシャクトリムシ型ロボットアームの技術準備レベル(TRL)の強化、米国のエンジニアリングモデル/フライトモデル製造施設の拡張などを挙げています。
同社が開発する月面ロボット探査機は、月面で探査・採掘・点検・保守運用・宇宙組み立てなどの汎用的な作業ができるというものです。
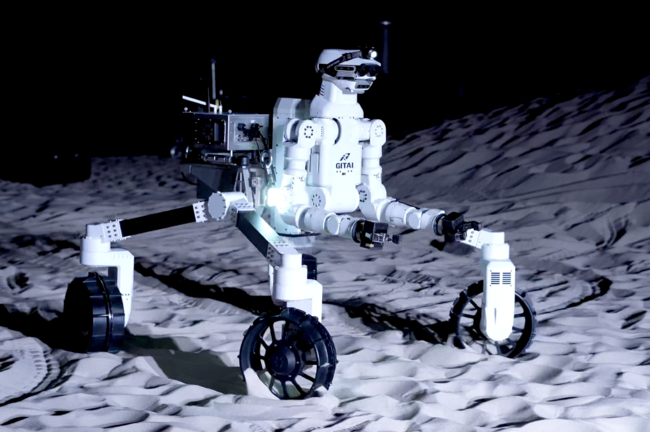 2021年12月にJAXA相模原の模擬月面環境で行われた試験では、同ロボットが走行・移動・障害物走破試験、ソーラーパネル組み立て試験、月面資源採取試験、斜面(砂丘)走破試験にすべてクリアしたことが確認されました。
2021年12月にJAXA相模原の模擬月面環境で行われた試験では、同ロボットが走行・移動・障害物走破試験、ソーラーパネル組み立て試験、月面資源採取試験、斜面(砂丘)走破試験にすべてクリアしたことが確認されました。
“稼働爪”を持つシャクトリムシ型ロボットアーム
GITAI Japanが開発しているシャクトリムシ型ロボットアームは、稼働爪を持つ「グラップルエンドエフェクタ」をアームの両端に搭載したもの。
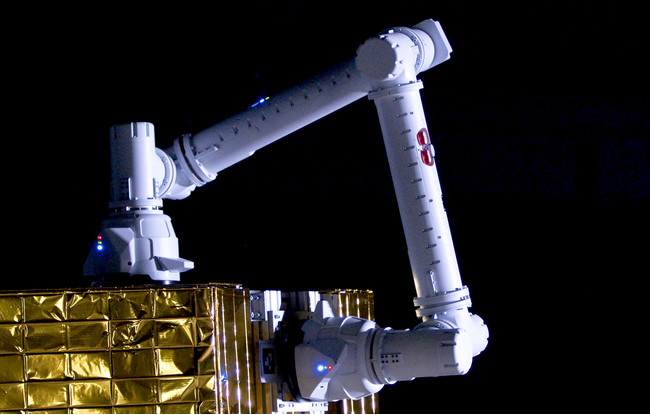 模擬月面環境での実験では、同アームが自律移動して月面着陸機からローバーに乗り移り、作業地点まで移動して所定の作業を行った後、再び月面着陸機に戻るという「移動性能」の検証試験にクリア。
模擬月面環境での実験では、同アームが自律移動して月面着陸機からローバーに乗り移り、作業地点まで移動して所定の作業を行った後、再び月面着陸機に戻るという「移動性能」の検証試験にクリア。
 また、月面資源採取作業を想定し、切削工具を使った資源サンプルの破壊、シャベルを使った資源サンプルの回収、牽引車を使った資源サンプルの運搬など、一連の作業を複数のツールを使い分けながら実現する「タスク性能」の検証試験にも成功しました。
また、月面資源採取作業を想定し、切削工具を使った資源サンプルの破壊、シャベルを使った資源サンプルの回収、牽引車を使った資源サンプルの運搬など、一連の作業を複数のツールを使い分けながら実現する「タスク性能」の検証試験にも成功しました。
今後、月面ロボット探査機とシャクトリムシ型ロボットアームがどのように進化していくのか、注目したいところです。
参考①:https://prtimes.jp/main/html/rd/p/000000285.000047342.html
参考②:https://prtimes.jp/main/html/rd/p/000000029.000042239.html
参考③:https://prtimes.jp/main/html/rd/p/000000021.000042239.html
GITAI Japan株式会社 公式サイト:https://gitai.tech/
(文・Haruka Isobe)
- Original:https://techable.jp/archives/209291
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:はるか礒部
Amazonベストセラー
Now loading...