株式会社ACSL(以下、ACSL)は、2019年6月に国立研究開発法人 宇宙航空研究開発機構(JAXA)から委託を受けた、JEM船内可搬型ビデオカメラシステム実証2号機(以下、Int-Ball2)航法機能ソフトウェアの製作において、ACSLの「Visual SLAM」技術をInt-Ball2に搭載する開発を行ってきました。
そして今回、2023年6月6日にSpace Exploration Technologies Corp.(略称、SpaceX)が開発したロケット「SpX-28」へInt-Ball2が搭載されて宇宙へ打ち上げられたと発表しました。
環境をモデル化しながらドローンの位置を推定
ACSLのコア技術であるVisual SLAMは、カメラの映像を画像処理することにより、環境をモデル化しながらドローンの自己位置を推定する技術です。
下図は、ドローンが黄色の開発したきぼう船内ドローン「JEM自律移動型船内カメラ(Int-Ball)」境モデルを生成している様子を示しています。
 今回、Int-Ball2に搭載されたVisual SLAM技術は、Int-Ball2がISS内を移動する際の自己位置を把握する役割を担うとのことです。
今回、Int-Ball2に搭載されたVisual SLAM技術は、Int-Ball2がISS内を移動する際の自己位置を把握する役割を担うとのことです。
宇宙飛行士の撮影に要する作業時間の軽減へ
「きぼう*」日本実験棟内では、実験やISSのメンテナンス作業の際に、宇宙飛行士がカメラを自身で準備して、写真・動画撮影を実施しています。
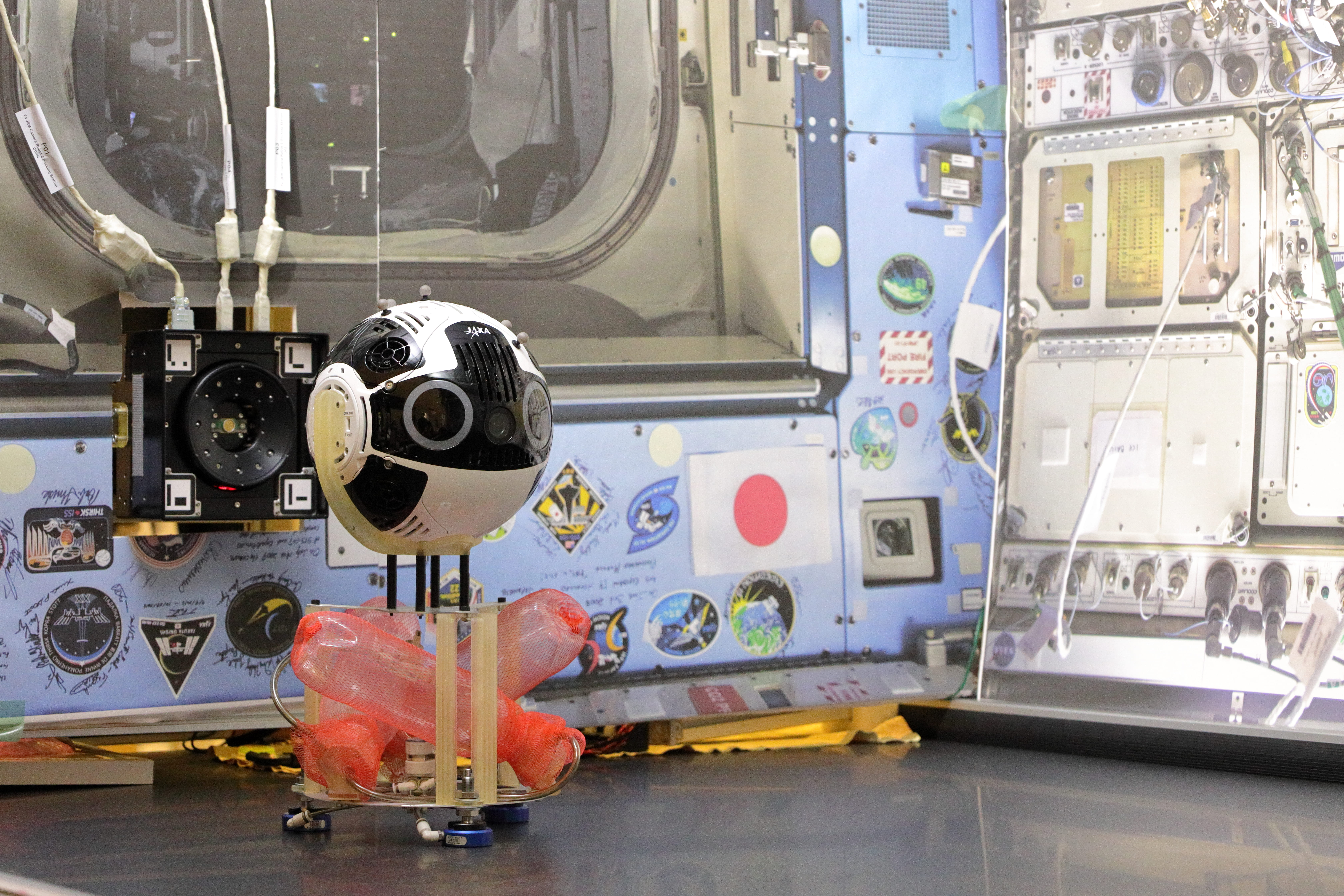
JAXAが開発した、きぼう船内ドローン「JEM自律移動型船内カメラ(Int-Ball)」は、みずから姿勢をコントロールしながらISS(国際宇宙ステーション)の中を移動して、静止画と動画の撮影を行うことが可能。撮影した映像は、リアルタイムで地上の管制員や研究者に届きます。
このInt-Ballの後継機となるのが、今回宇宙へと打ち上げられたロケット「SpX-28」に搭載されたInt-Ball2です。
Int-Ball2は、初号機で得られた知見をもとに、自律的に飛行する機能性能の向上や、充電のため自動でドッキングし再飛行する新たな機能が追加されたもの。宇宙飛行士の撮影に関する作業時間をゼロにすることを目標としています。
きぼう*…ISSにある日本の宇宙実験棟
参考:https://prtimes.jp/main/html/rd/p/000000088.000042802.html
JAXA 有人宇宙技術部門 公式ホームページ:https://humans-in-space.jaxa.jp/news/detail/003155.html
(文・Haruka Isobe)
- Original:https://techable.jp/archives/211305
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:はるか礒部
Amazonベストセラー
Now loading...