ドローンの自律飛行は人間のオペレーターによってもトレーニングできるが、時間とコスト、危険性を考慮するとシミュレーション環境を利用するほうがいい。
ただ、シミュレーション環境でのトレーニングの成果が、天候や照明の具合が大きく変わる現実世界では通用しないことがある。こうしたことからカーネギーメロン大学の研究者は、知覚と行動を別々にトレーニングする新手法を開発した。
この、人間がしていることに近いトレーニング設計で、ナビゲーションの堅牢性を高める。
ピクセル数を減らした画像を用いてトレーニング
自律飛行を実現するには、ドローンはまず環境を正確に知覚し、その情報に基づいて意思決定する必要がある。2段構えのアプローチを用いれば、シミュレーション環境でトレーニングされたドローンを、現実世界のコースで安全に展開できるという。
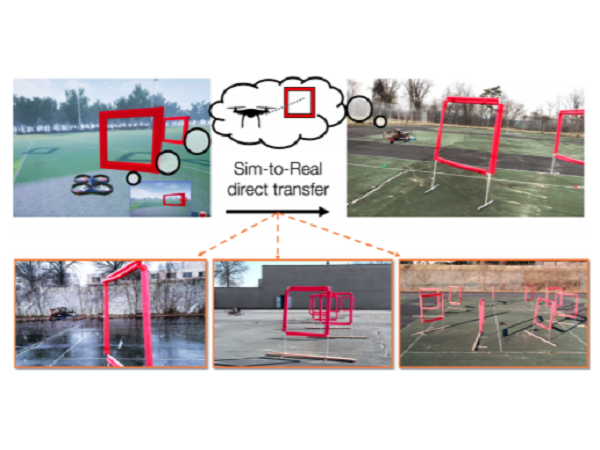
研究者は、まずドローン、サッカー場、地面から浮いたゲートを含む、写真のようにリアルなシミュレーション環境を用意。ランダムに生成された何千ものドローンとゲートの組み合わせで、大規模データセットを構築した。
照明、色、質感……などモダリティの違いが、ドローンの知覚失敗につながる。これを克服するために、複数のモダリティでドローンをトレーニングし、環境の変化に対する堅牢性を高めることに。
また、圧縮してピクセル数を減らした画像を用いてトレーニングすることで、ノイズの多い現実世界でもゲートを知覚できるようにしている。
自動運転や調理などのタスクにも応用可能
知覚をトレーニングしたら、次はシミュレーション環境内で移動方法をトレーニングする(トレーニングの様子は動画で確認可能)。例えば、各ゲートを通過する際の速度をトレーニングが必要だ。
順を追ってトレーニングすることで、ドローンは特定の条件でなく、動きの要素を学習する。これにより、ノイズが多い環境下でも自律飛行が可能に。さまざまな条件下の知覚と行動はマッピングされる。
知覚と行動を切り離したトレーニング手法は、ドローンの自律飛行だけでなく、自動運転や調理など、AIのさまざまなタスクに応用できるものだ。
参照元:CMU Researchers Train Autonomous Drones Using Cross-Modal Simulated Data/ CMU News
- Original:https://techable.jp/archives/136018
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...