
民間航空機はエンジンの1つが停止しても問題なく飛び続けられるが、4つのプロペラを備えたクワッドコプターの場合そうはいかないようだ。
モーターが1つ故障すれば、ドローンは安定性を失いそのままクラッシュする。チューリッヒ大学の研究者らはこうした問題を解決する方法を発見。ドローンは車載カメラからのデータを利用し飛行を安定化。故障した後も自律飛行が可能となる。
2種類のカメラからの情報を利用
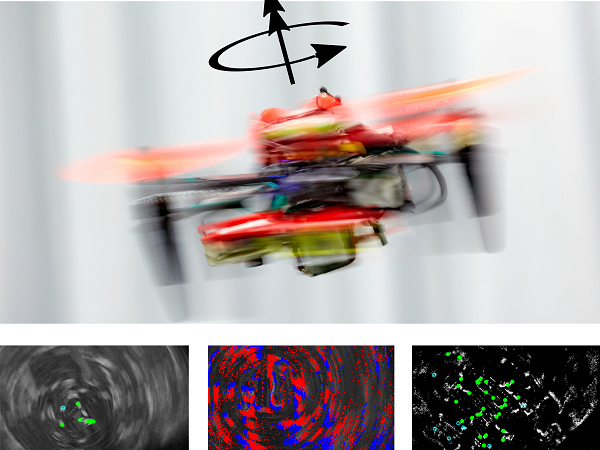
Credit: UZH
そこで研究者らは、車載カメラからの視覚情報を使用する方法を採用。
ドローンには2種類のカメラを搭載した。1秒に数回撮影する標準カメラと、光の変化を検出したときのみアクティブになるイベントカメラだ。
研究チームは、2種類のカメラからの情報を組み合わせて分析し、機体の周囲に対しての位置を追跡するアルゴリズムを開発した。
故障時も機体の位置を正確に推定
正確な位置の推定により、ドローンが故障し回転しているときでさえ、コンピューターにより飛行が制御できる。
研究者らは、通常の光条件下で同システムがうまく機能するのを示した。さらには、標準カメラが使い物にならない暗所においてもイベントカメラがうまく機能することがわかったという。
同技術の搭載により、救助や撮影、配送など多用途での活用が拡がるドローンの安全性と耐性が向上しそうだ。
参照元:How to Keep Drones Flying When a Motor Fails/ UZH News
- Original:https://techable.jp/archives/146625
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...