掃除ロボットや配達ロボットなど、さまざまな自律移動ロボットが登場しているが、障害物回避の方法については、まだまだ進化の余地がありそうだ。
このほどジョンズ・ホプキンズ大学の研究チームは、ゴキブリの動きを観察することで、簡単で効率的な障害物回避方法を見出した。
ジョンズ・ホプキンズ大学は、以前にもゴキブリの移動方法を取り入れたロボットを構築していて、あらゆる地形をものともせずに進むゴキブリから学ぶことは多いのだろう。
障害物を通過すために揺れを利用
研究チームは、リアルなゴキブリの挙動を理解し、堅牢ななロボットの開発に役立てようと調査を開始した。
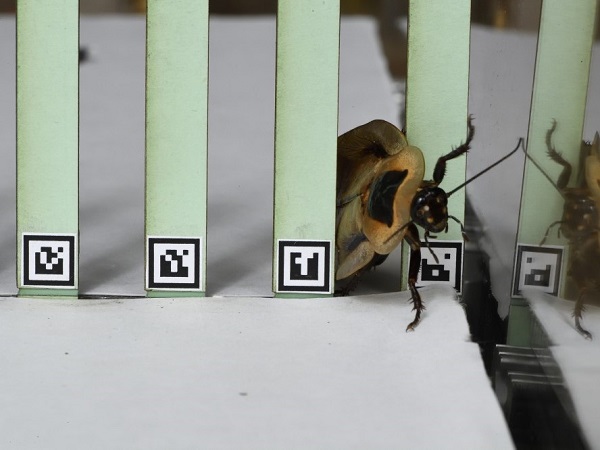
調査のために、バネに取り付けられたプレートを設置した障害物コースを作成。ゴキブリが障害物を通過するさまを観察したところ、身体を上に向け曲がるまで障害物を押す、障害物の隙間に合わせて身体を回転させる…の2パターンの動きを用いていた(動画で確認できる)。
そしてゴキブリが、2パターンの動きの切り替えに、障害物との相互作用で生じる揺れを利用しているのを発見したようだ。
センサーや綿密な動作計画なしで動きが切り替えられる
さっそくゴキブリの動きを模倣したロボットを構築し、揺れの大きさを調整。ロボットの揺れが大きいほど、2パターンの動きの切り替えに必要なエネルギーが楽に得られることがわかった。
こうして揺れを利用することで、センサーや綿密な動作計画がなくても障害物が乗り越えられるという。
今後、災害救助や惑星探査などで自律移動ロボットがさらに活躍するはずだが、今回の発見が、過酷な環境で作業するロボットをより堅牢なものにしてくれそうだ。
参照元:Jitterbug: Roaches and Robots Shake It to Transition Between Movements in Tricky Terrain/ NewsWise
- Original:https://techable.jp/archives/128565
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...