
近年、空飛ぶクルマ実用化に向けた取り組みが活発化しています。国内においても、2025年の大阪・関西万博にて空飛ぶクルマの輸送サービス実現が打ち出されました。
そのうえで課題のひとつとなっているのが、万博会場上空や万博会場周辺空域の安全確保(衝突回避)。これは、万博での空飛ぶクルマ実用化にとどまらず、今後空飛ぶクルマを社会実装していくなかで重要な課題でもあります。
そこで株式会社FaroStar(以下、FaroStar)は、株式会社ACSL(以下、ACSL)協力のもと「非管制区域を飛行する無人航空機と回転翼航空機の安全性を高める衝突防止自動管制技術の実証試験」を実施し、成功しました。
衝突回避したあと、もとの計画ルートへ戻る
同実験は、2月2日(水)に大阪府大阪市、3日(木)に広島県福山市で実施しています。
実験に活用したのは、FaroStarが開発した衝突防止自動管制技術(AURORA)。これは、航空機やドローンの飛行情報を取得し、飛行体同士が衝突する可能性を検知すると、回避可能なWP(ウェイポイント)を指定して自動回避させ、衝突を回避できたと判定すると次のWPに誘導するアルゴリズムです。
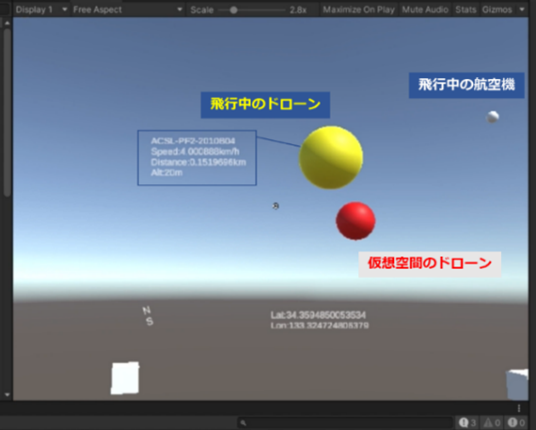 今回は、AURORAをACSLのドローン「ACSL-PF2」に搭載。この実機が飛行中に仮想ドローンの回避と回避後のルート回帰を実行できるかを検証しました。
今回は、AURORAをACSLのドローン「ACSL-PF2」に搭載。この実機が飛行中に仮想ドローンの回避と回避後のルート回帰を実行できるかを検証しました。
結果、2か所の実証試験において計画飛行中のドローンが衝突防止自動管制システムからの指示により仮想ドローンを回避し、そのあと計画飛行ルートへ戻って予定地に着陸したとのことです。
 「ACSL-PF2」は、すでに物流やインフラ点検などの分野で活躍し、補助者なし目視外飛行(Level3)の実績もある機体。そんな同機体での実証成功は、空飛ぶクルマへの活用を含め、今後の活用シーンの広がりに期待できる結果と言えるでしょう。
「ACSL-PF2」は、すでに物流やインフラ点検などの分野で活躍し、補助者なし目視外飛行(Level3)の実績もある機体。そんな同機体での実証成功は、空飛ぶクルマへの活用を含め、今後の活用シーンの広がりに期待できる結果と言えるでしょう。
空飛ぶクルマの活用をイメージしたシナリオを設定
同実験では、空飛ぶクルマの具体的な利用方法を住民が体験することで、社会的受容性の醸成を図ることも目的としています。
福山市の実験では、離島と都市部で離れて暮らす家族が会う手段として空飛ぶクルマを活用するというシナリオを設定。住民代表として小学生が空飛ぶクルマに見立てたドローンを呼び出し、乗ったつもりで再びドローンを飛ばすという体験をしました。
小学生は校庭から配車アプリ「FaroStarVisionアプリ」でドローンを呼び出すプロセスの説明を受け、ドローンの飛行状況をアプリやMRゴーグルでリアルタイムに確認したようです。
なお、体験した小学生の通う小学校(実験場)は、2023年3月に廃校が決定しています。このシナリオに基づいた実験は、寂しい思いを抱える子どもたちに明るい未来の体験を提供したいという思いから実現したようです。
新モビリティの自動管制サービス
今回実証に成功したFaroStarは、空飛ぶクルマやドローン、自動運転車、無人運航船など高度150m以下で運行・運航する新モビリティの安全性を実現する自動管制サービスを提供しています。
代表的なのは、AURORAをベースとした都市交通管制システム「Urban Mobility Traffic Control Systems(UMTCs)」。東京本社にあるUMTCs管制センターから、上記のような新モビリティを複数同時に管制できるというシステムです。
「UMTCs」では、エアモビリティのフライトプラン管理や国土交通省への提出支援をはじめ、モビリティの運行情報(位置・高度・速度・ウェイポイントなど)のリアルタイム管理が可能。もちろん、複数のエアモビリティ間や障害物などへの自動衝突回避や緊急時の運航停止、指定された場所への自動帰還もできます。
FaroStarはこのほか、ドローン物流事業者およびエアタクシー事業者向けの自動管制システム「エアモビリティプラットフォーム」も提供中です。
(文・Higuchi)
- Original:https://techable.jp/archives/173319
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:樋口
Amazonベストセラー
Now loading...