HMS株式会社(以下、HMS)は、キヤノンITソリューションズ株式会社(以下、キヤノンITS)と提携。今回、2023年6月7日よりキヤノンITSが販売開始するVisual SLAMソリューション“自己位置推定システム with Vision-based Navigation Software”に、HMSのAIスマートカメラ「SiNGRAY(シングレイ)StereoPRO」が採用されたと発表しました。
これによりAGV(無人搬送車)やAMR(自律移動ロボット)、ドローンなどの移動や動作に必要とされる的確な周辺環境情報取得を可能とし、各種産業における自動化や無人化、その先にはスマート社会の実現に貢献するとのことです。
位置姿勢計測・環境地図作成を行うSLAM機能
近年のAIをはじめとしたテクノロジーの発展と労働人口減少などの外部環境から、スマート社会実現への機運が非常に高まっています。
そのなかで自動化・省力化を可能にするロボティクスやIoTにおける取り組みとして、AGVやAMR、ドローン、人や物体などを認識して駆動するサービスロボットを活用した工場や物流、商業施設などでの自動化や無人化が進められています。
これらの高度な自律性型ロボットには、移動や動作において的確な周辺環境情報の取得が必要で、位置姿勢計測と環境地図作成を同時に行うSLAM機能の精度の高さが重要とのことです。
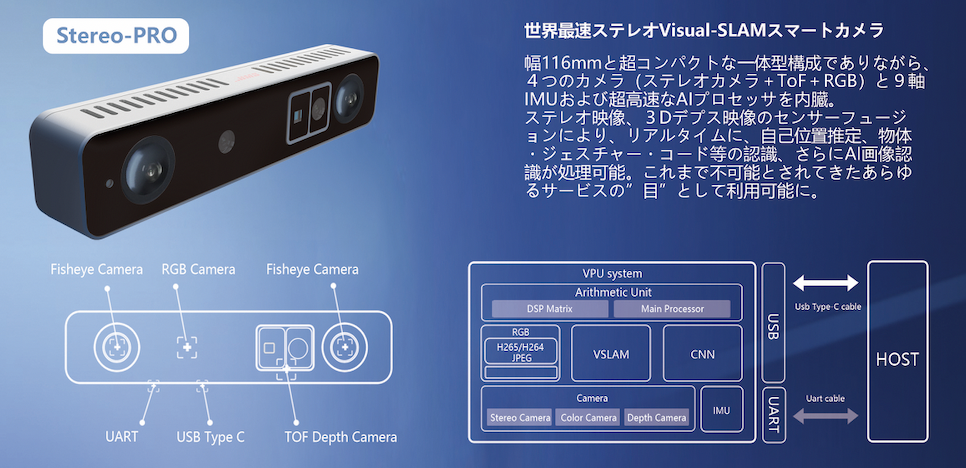
そんななか、“自己位置推定システム with Vision-based Navigation Software”では、キヤノンITSのVisual SLAMソフトウェア「Vision-based Navigation Software」に対応するカメラモジュール(ハードウェア)としてHMSのAIスマートカメラ「SiNGRAY StereoPro」が採用されました。
地図作成に必要なルート走行テストの回数を減らす
 SLAM機能において、Visual SLAMは、自律型ロボット・移動ロボットの眼となる技術です。
SLAM機能において、Visual SLAMは、自律型ロボット・移動ロボットの眼となる技術です。
ステレオカメラ(2眼のカメラ)を用いることで、立体的(3次元)かつ広範囲の環境情報を把握し、カメラの位置や姿勢を同時に推定するため、レイアウト変化の多い現場にも柔軟に対応することができます。
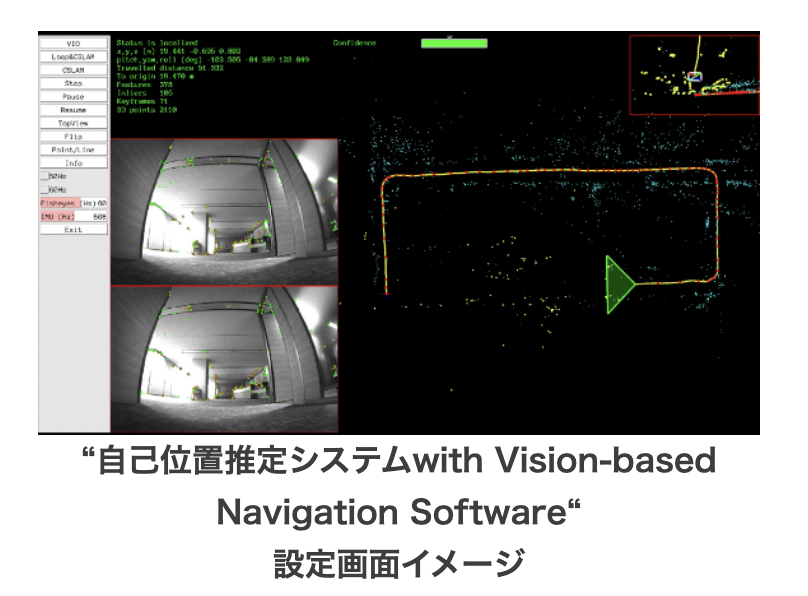
「Vision-based Navigation Software」のVisual SLAMは、立ち上げ時の高速な位置姿勢計測を実現し、また暗所や逆光に強く照明変動や外光環境への順応性が高いため、地図作成に必要なルート走行テストの回数を少なくすることが可能。
加えて、検出した特徴点の分布やルート走行で作成した地図、計測信頼度のメーター表示を同一画面上で閲覧可能なため、稼働環境によって発生する課題への対応の迅速化に貢献します。
外光環境への順応性や高速処理を実現
「SiNGRAY StereoPro」は、ステレオカメラに加え、リーズナブルなレーザーセンサのToF、カラーセンサー、AIプロセッサおよび、上下前後左右の動きを把握するIMUプロセッサをコンパクトに一体化しています。
これらのセンサの一体化(センサフュージョン)により「Vision-based Navigation Software」に必要とされる外光環境への順応性や高速処理・同時処理を実現するとして、採用されました。
参考元:https://prtimes.jp/main/html/rd/p/000000002.000110128.html
(文・Haruka Isobe)
- Original:https://techable.jp/archives/212909
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:はるか礒部
Amazonベストセラー
Now loading...