 さまざまな車メーカーが自動運転車に取り組んでいるが、水上でも同様の動きがあり、人間が操作することなく障害物を避けながらスマートに自動航行するボートが現実のものになろうとしている。
さまざまな車メーカーが自動運転車に取り組んでいるが、水上でも同様の動きがあり、人間が操作することなく障害物を避けながらスマートに自動航行するボートが現実のものになろうとしている。
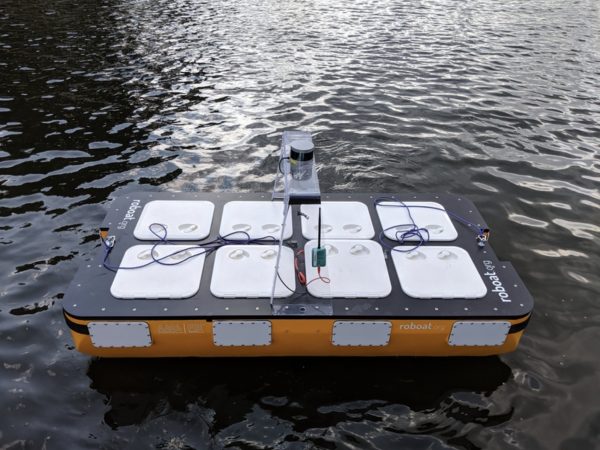
マサチューセッツ工科大学(MIT)のコンピューター科学・人工知能研究所とSenseable City Labは共同で自動航行するボート「Roboat Ⅱ」を開発した。すでにオランダ・アムステルダムの運河でテスト中だ。
センサーやGPS搭載
 MIT の研究チームは過去5年、自動航行ボートの開発に取り組んできた。ただし、これまでのものはゴミなど荷物運搬を想定していたが、今回発表したRoboat Ⅱは人を乗せることができる。
MIT の研究チームは過去5年、自動航行ボートの開発に取り組んできた。ただし、これまでのものはゴミなど荷物運搬を想定していたが、今回発表したRoboat Ⅱは人を乗せることができる。
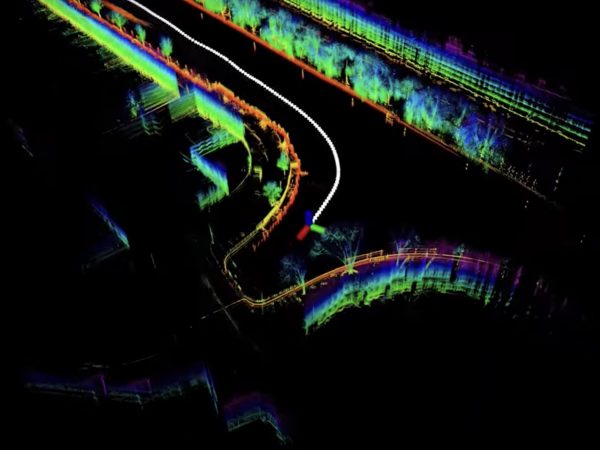
荷物運搬タイプと同様、Roboat ⅡはLiDARやGPSを搭載し、これらが収集するデータ活用してナビゲートする独自開発のアルゴリズムより自動航行が可能だ。プロペラ4つを搭載し、360度あらゆる方向に航行できる。
自動航行で出発地点に帰着
荷物運搬ボートは4分の1スケールだったのに対し、今回公開したRoboat Ⅱは2分の1スケール。長さ2メートルあり、2人乗ることができる。駆動時間は3時間で、自動航行で出発地点に戻ってくることが可能という。帰着場所の誤差は現段階で0.17メートルとのこと。
発表によると、フルスケールのものは乗客4〜6人を乗せることができる見込み。こちらは現在建造中だが、テスト開始時期などはまだ明らかになっていない。建造とともに、水の流れや波などにさらにうまく対処できるよう、アルゴリズムの改善も進めている。
運河システムはオランダの重要な都市インフラであり、Roboat Ⅱは既存のインフラをより効率的に生かす取り組みとなる。近い将来、Roboat Ⅱは通勤客や観光客の足となっているかもしれない。
- Original:https://techable.jp/archives/140487
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:mizoguchi
Amazonベストセラー
Now loading...