ソフトロボットは、人間の近くで安全に作業できるとのメリットがあります。ただ、これまでの多くのソフトロボットには、アクチュエータをはじめさまざまなハードウェアと電気が必要でした。
こうしたなか、カリフォルニア大学リバーサイド校(UCリバーサイド)の研究者らは、ソフトロボットの制御に使用できる空気圧式のコンピュータメモリを発表しています。
空気圧ランダムアクセスメモリ(RAM)では、電子ハードウェアを利用せず、バッテリー駆動のポンプのみでロボットを制御可能です。
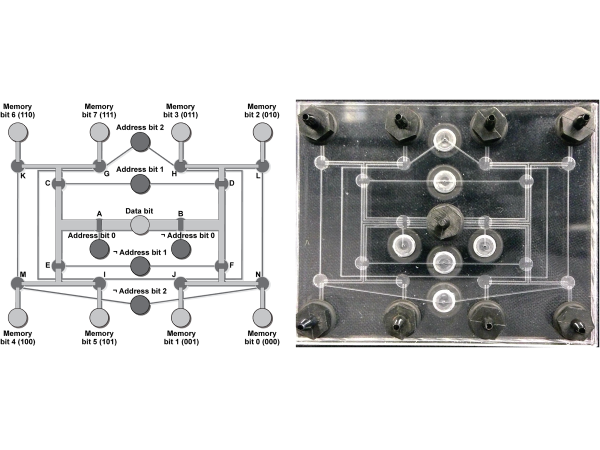
論理回路はマイクロ流体バルブ
空気圧RAMチップには、トランジスタの代わりに空気の流れを制御できるるマイクロ流体バルブを使用しています。また、電気の代わりに空気が論理回路を流れ、空気圧の状態(真空/大気圧)により1/0を表します。
密閉したマイクロ流体バルブを利用することで、開放したバルブから構築されたものよりも複雑な計算が可能とのこと。それぞれのバルブが空気圧の状態を保存し、メモリとして機能するほか、圧力差によりロボットのアクチュエータを制御しています。
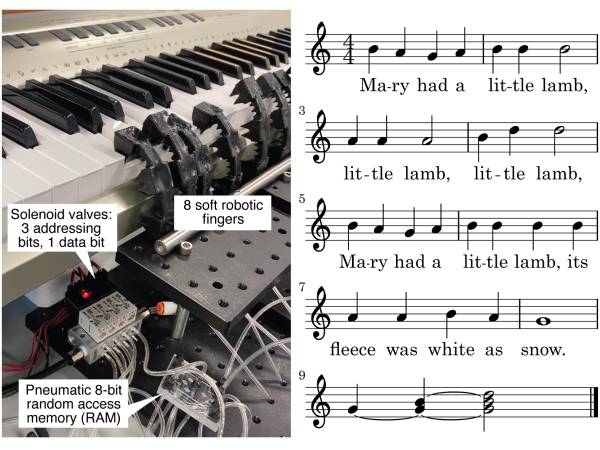
8ビットの空気圧RAMチップでロボットハンドを制御
Credit: A pneumatic random-access memory for controlling soft robots/ Plos One
研究者らは、8ビットの空気圧RAMチップを製造し、3Dプリントしたロボットハンドに組み込みました。ロボットハンドの指は空気圧で動作し、真空状態で屈曲、大気圧の状態で伸展します。
空気圧RAMチップ、チャネル内の真空/大気圧の組み合わせを変えることで、ロボットハンドでのピアノ演奏ができたようです(演奏の様子は動画で確認できます)。
必要なハードウェアの量を削減できる空気圧RAMチップは、ソフトロボット活用の幅を広げてくれそうです。
参照元:Air-powered computer memory helps soft robot control movements/ UC Riverside News
A pneumatic random-access memory for controlling soft robots/ Plos One
(文・山田洋路)
- Original:https://techable.jp/archives/158445
- Source:Techable(テッカブル) -海外・国内のネットベンチャー系ニュースサイト
- Author:YamadaYoji
Amazonベストセラー
Now loading...